Этап 1
Анализ предметной области выявление аналогов
В данном этапе мы знакомимся с темой, ее актуальностью, а так же ищем интересные решения которые можно использовать.
Подэтап 1. Анализ существующих роботов-снегоуборщиков и выявление аналогов
В ходе анализа было выявлено несколько общих критериев снегоуборочников которые отражены в инженерной книге
Подэтап 2. Разработка технических требований
Исходя из предидущего этапа нами был составлен список требований к снегоуборочнику:
- Уборка снега при помощи ковша между четырьмя точками образующими прямоугольник
- Остановка при появлении какого-либо препятствия в поле зрения робота, а затем продолжение движения
- Наличие двух режимов работы:Автономный и управление с пульта
- Автономный режим должен быть реализован таким образом, что робот выполняет свои задачи ориентируясь по четырем точка.
Этап 2
Изготовление и программирование колесной базы
На данном этапе мы будем изготавливать шасси робота и программировать простые движения.
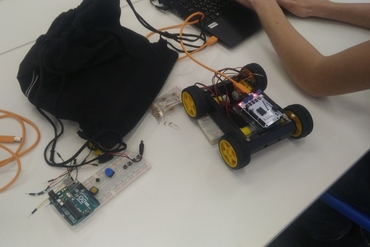
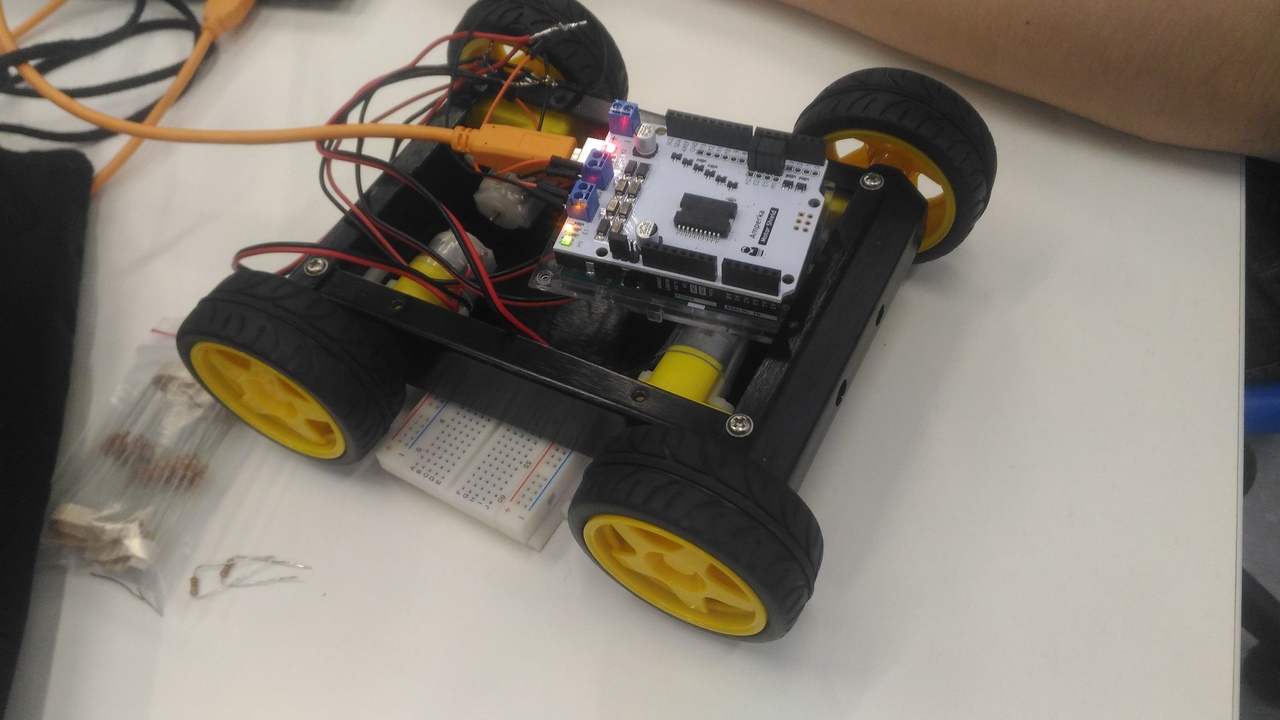
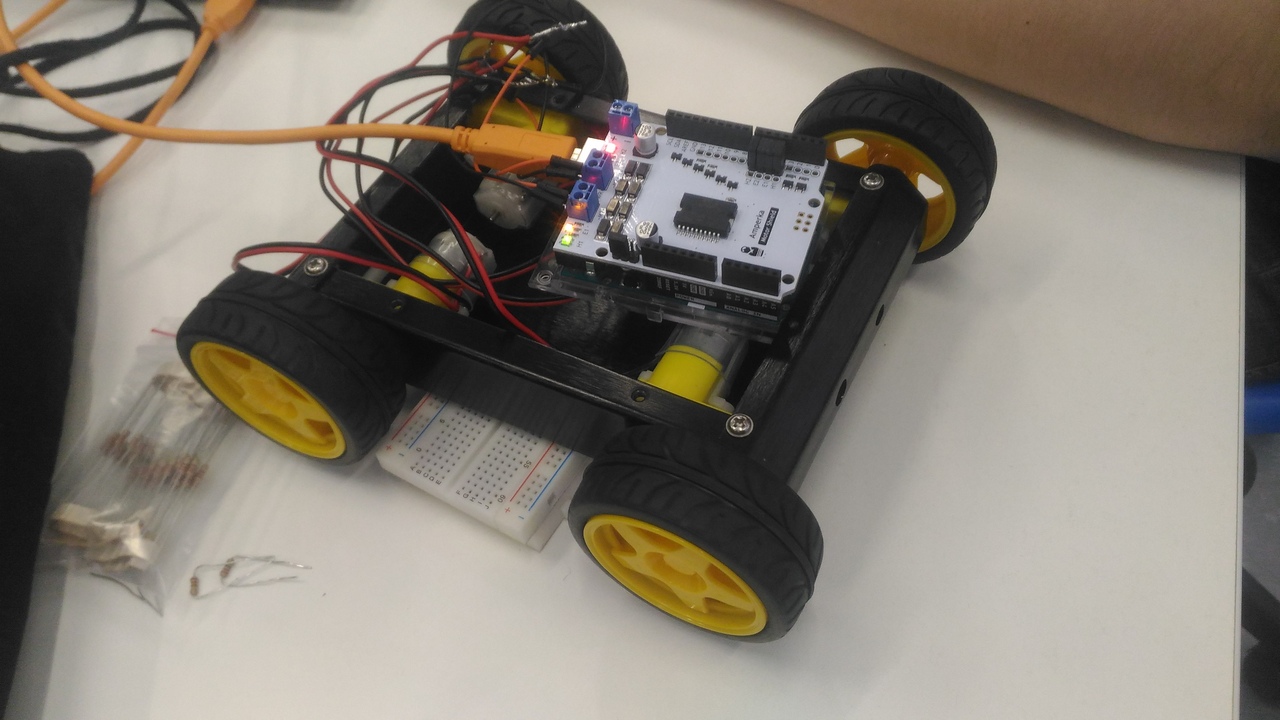
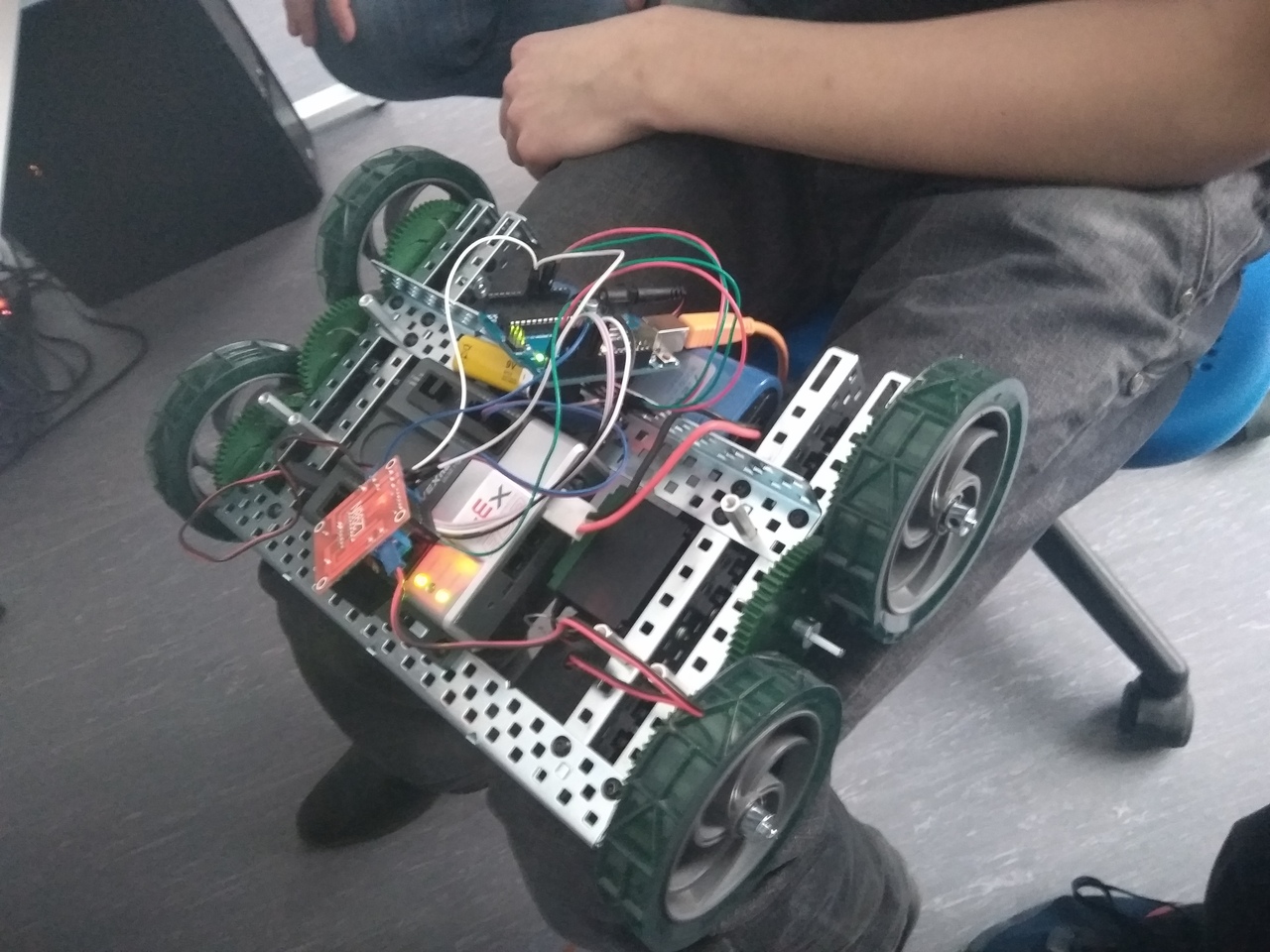
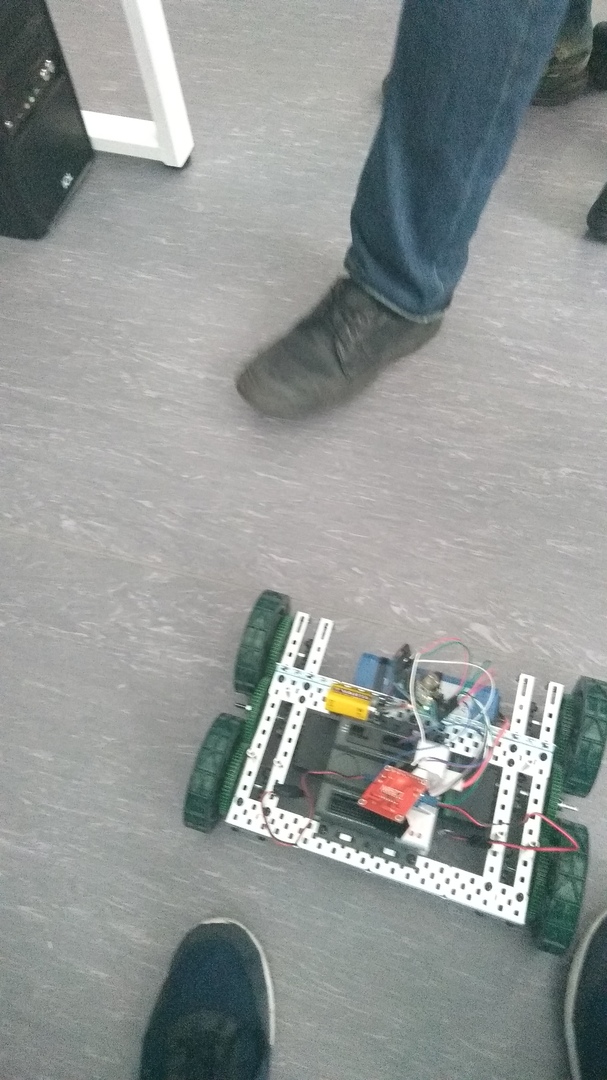
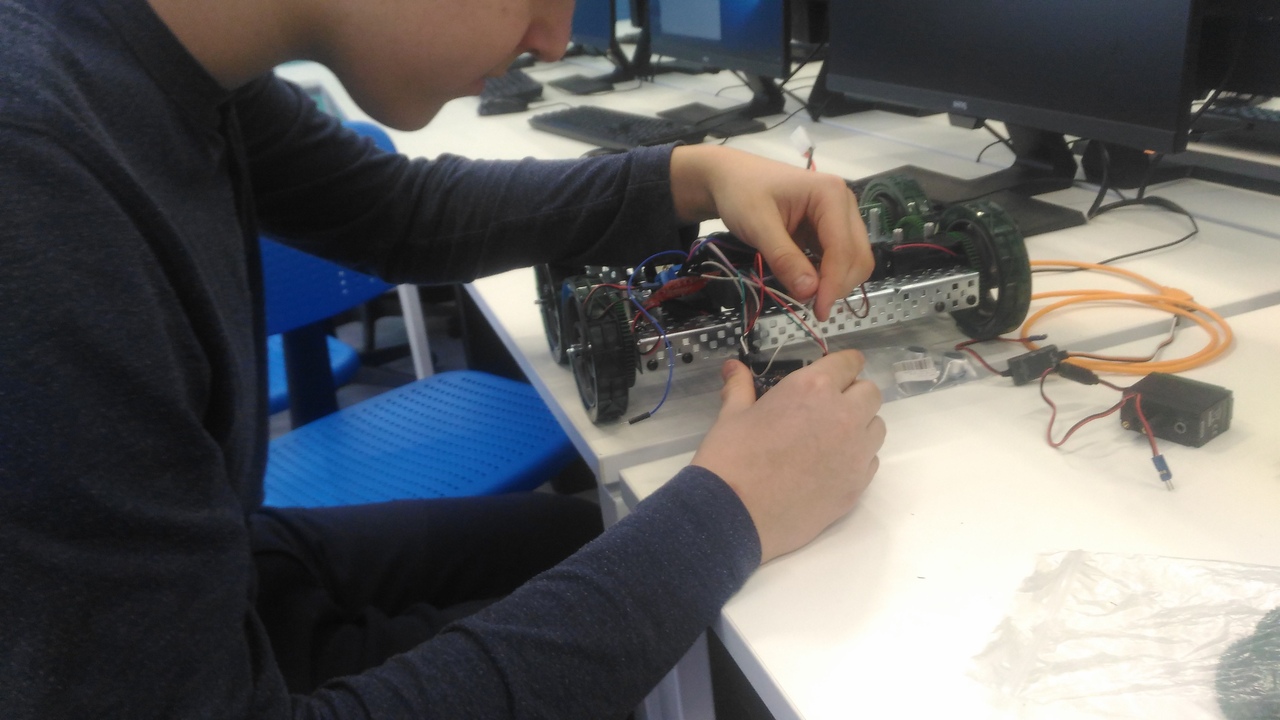
Подэтап 1. Изготовление колесной базы робота
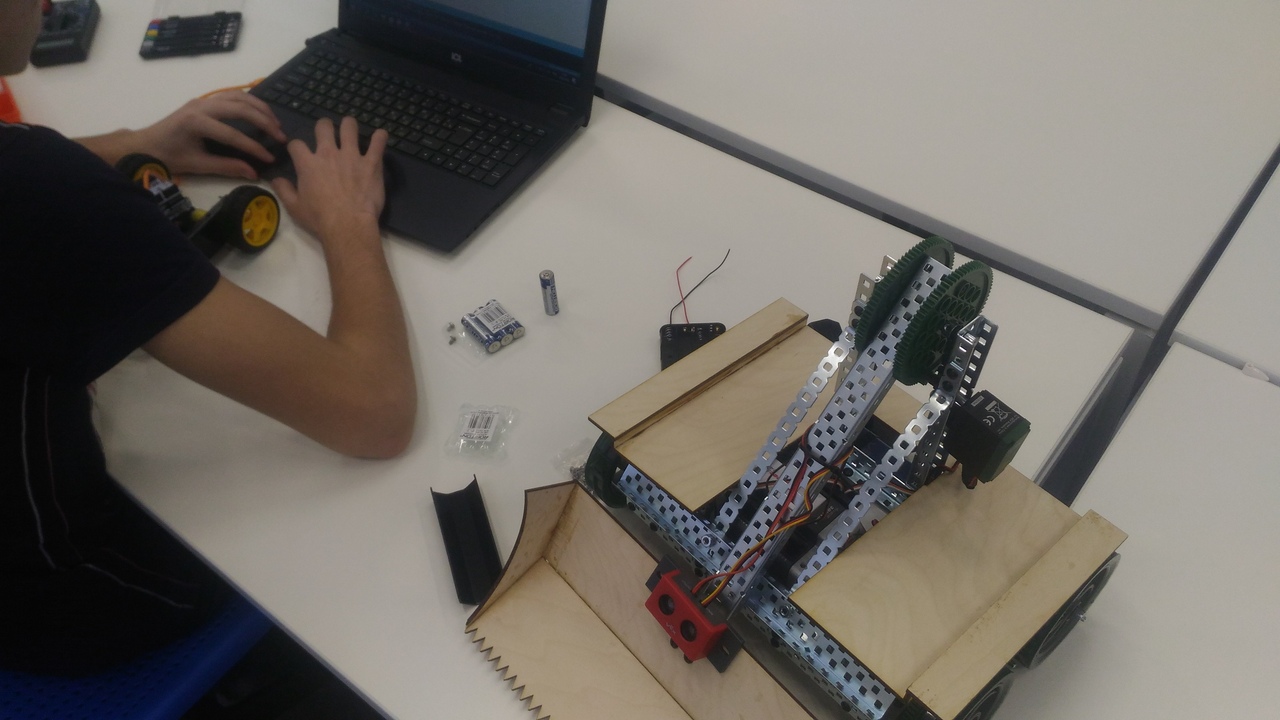
В этом подразделе мы изготовили шасси используя конструктор VEX, платформа использует два мотора и удовлетворяет поставленным задачам.
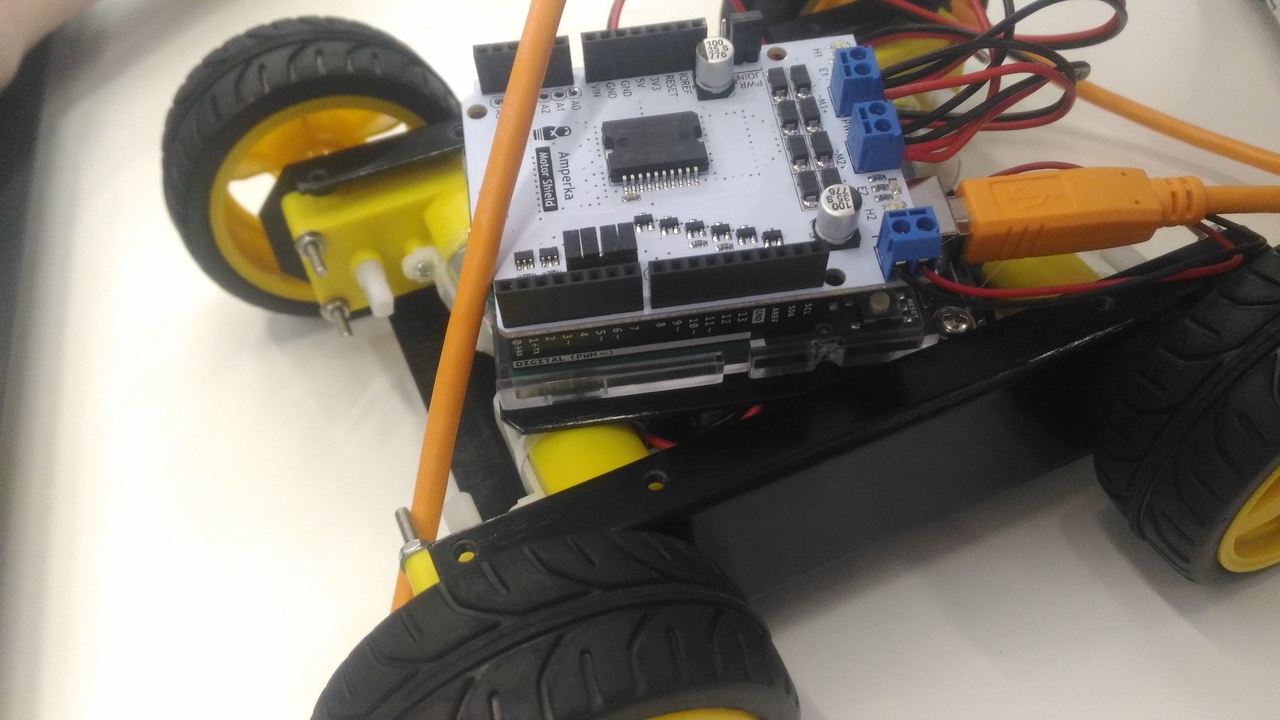
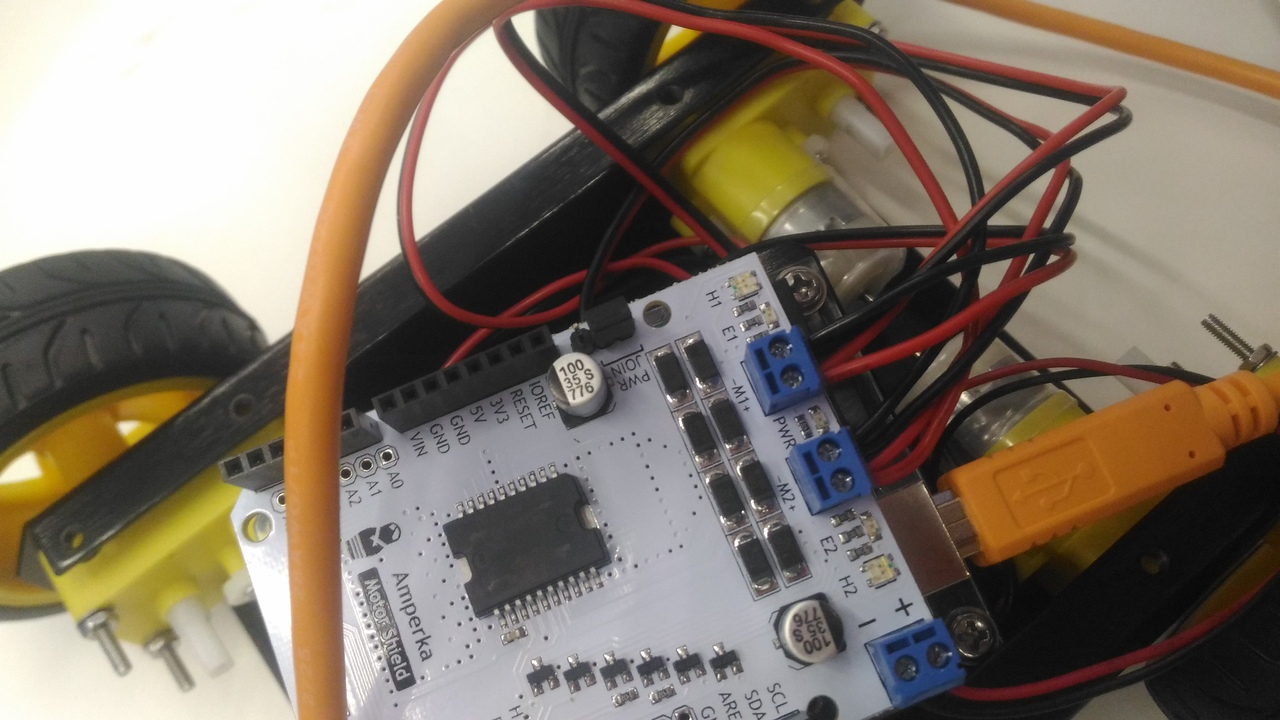
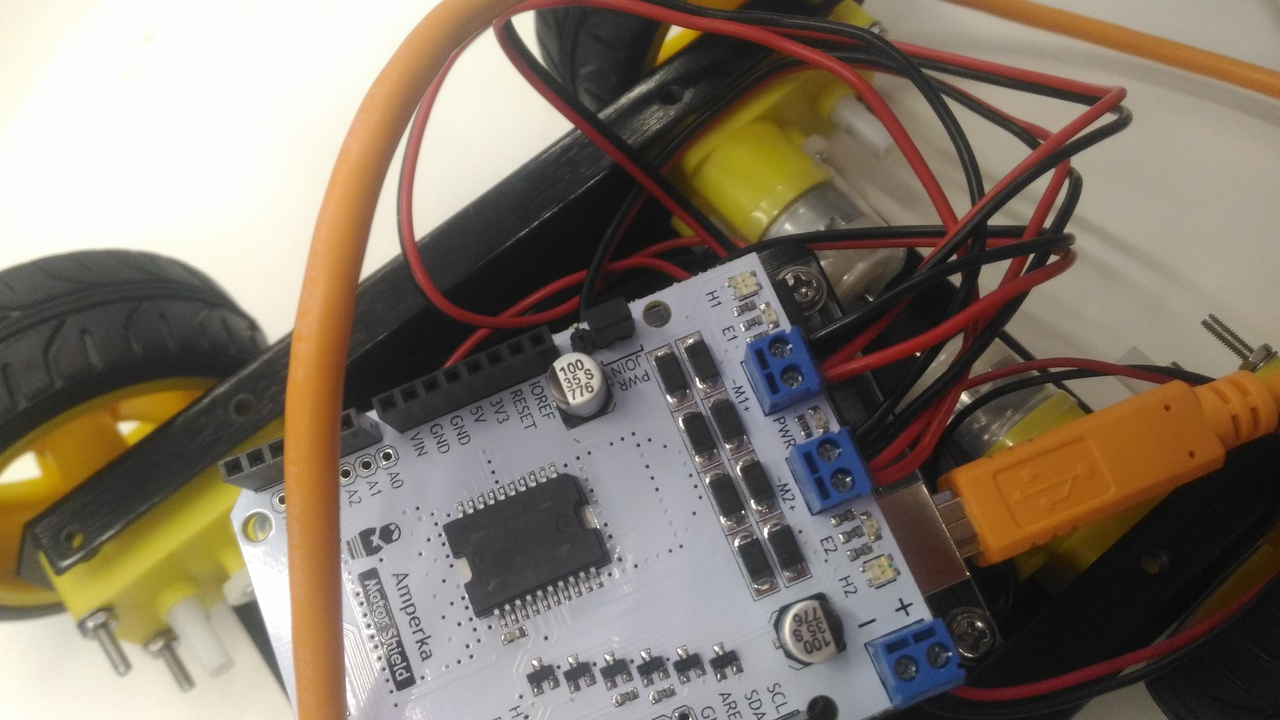
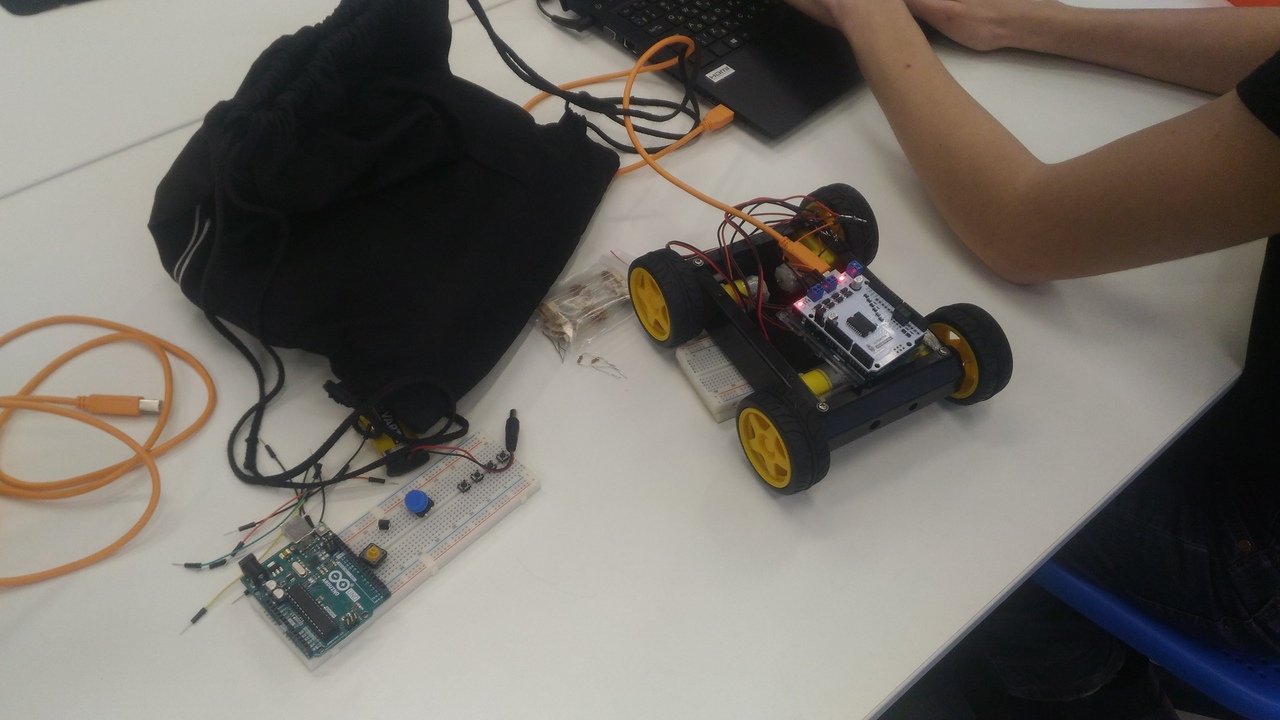
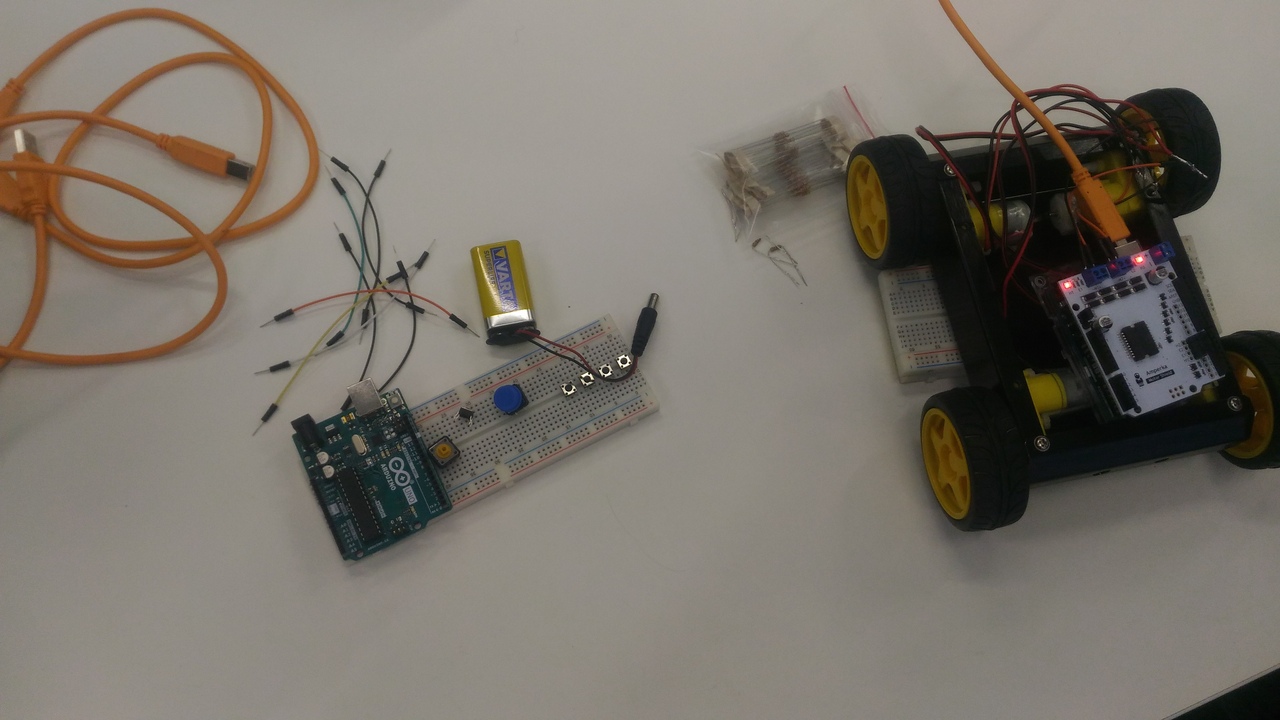
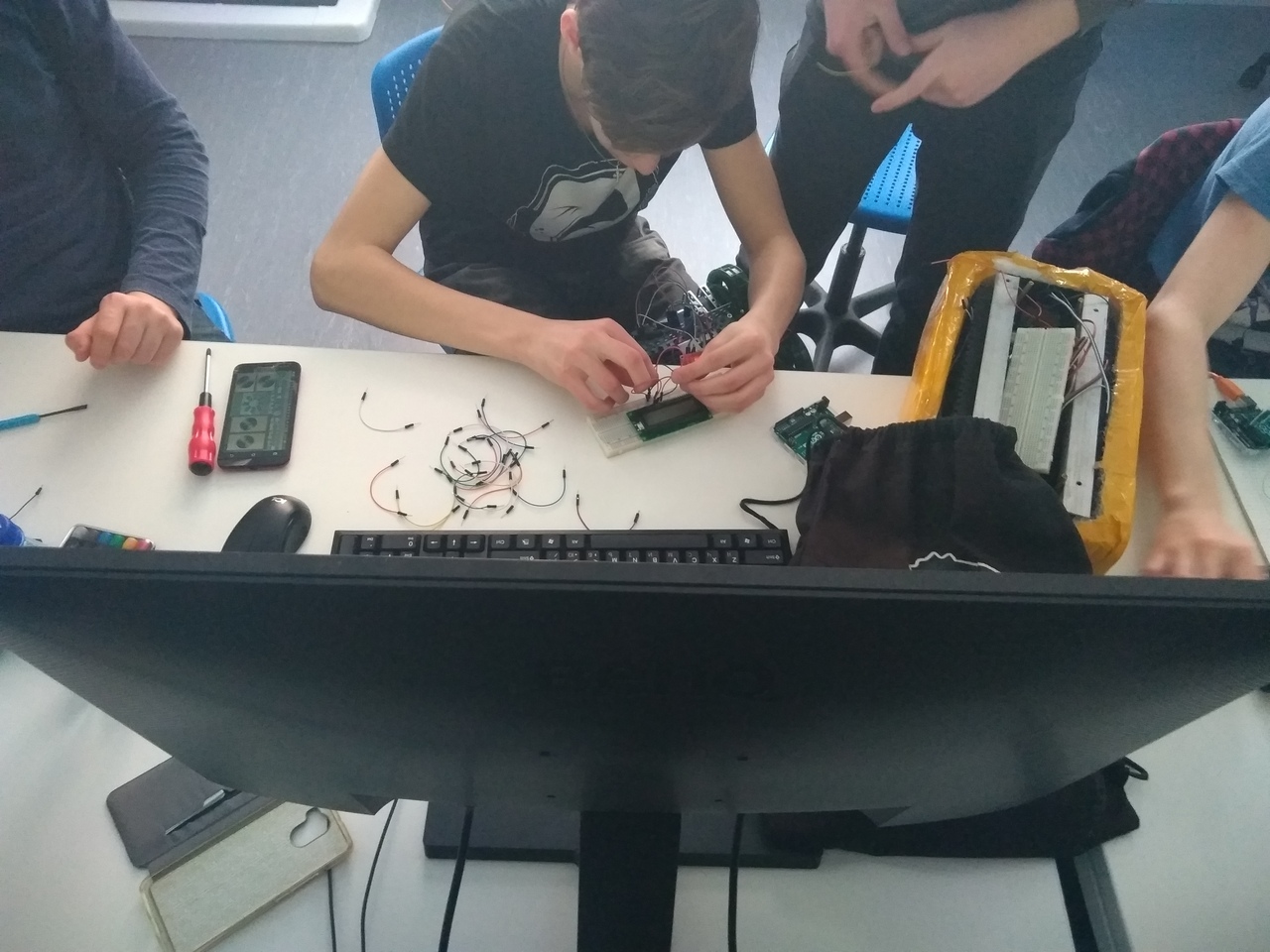
Подэтап 2. Сборка устройства для управления колесами
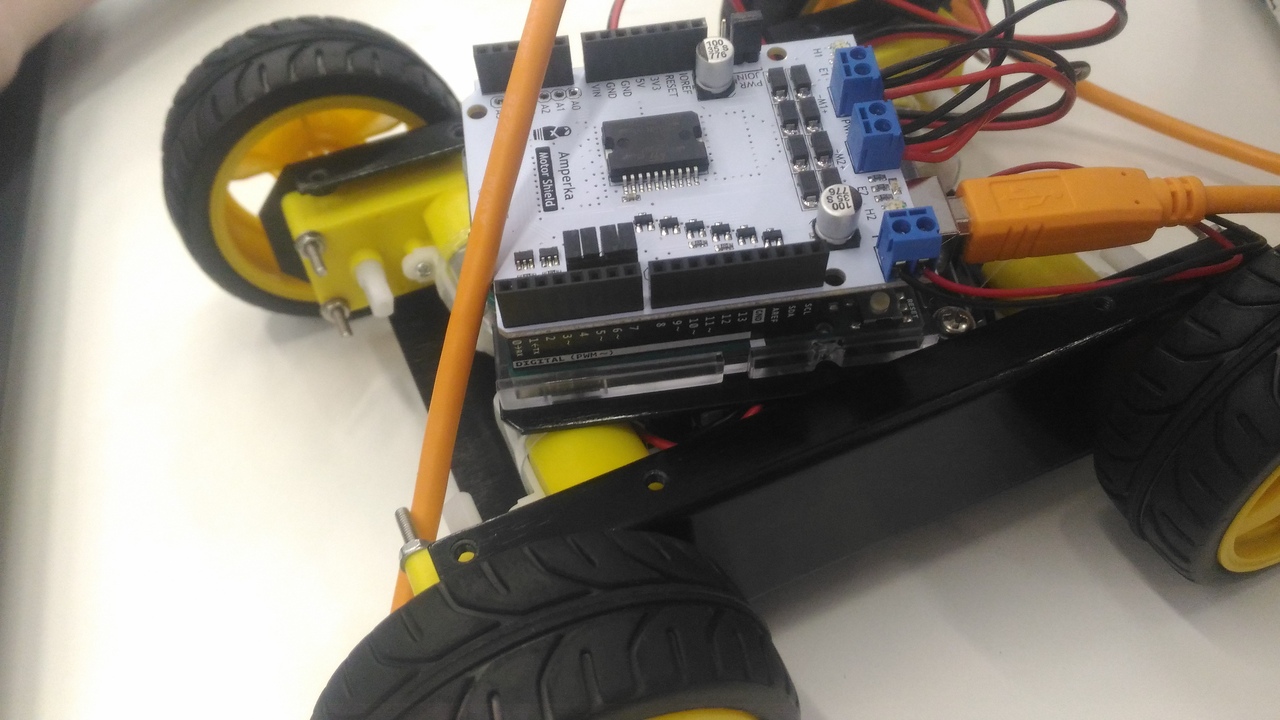
Собрав шасси мы приступили к сборке устройства для управления колесами для этой цели мы изначально планировали взять контроллер от конструктора VEX который мог стать "мозгом" всего устройства,но отказались от этой идеи из за сложности программирования и плохой совместимости с большинством датчиков.Нами было принято решение использовать Arduino mega и драйвер моторов. В качестве драйвера мотора было решено использовать модуль Motor Shield от Амперки.
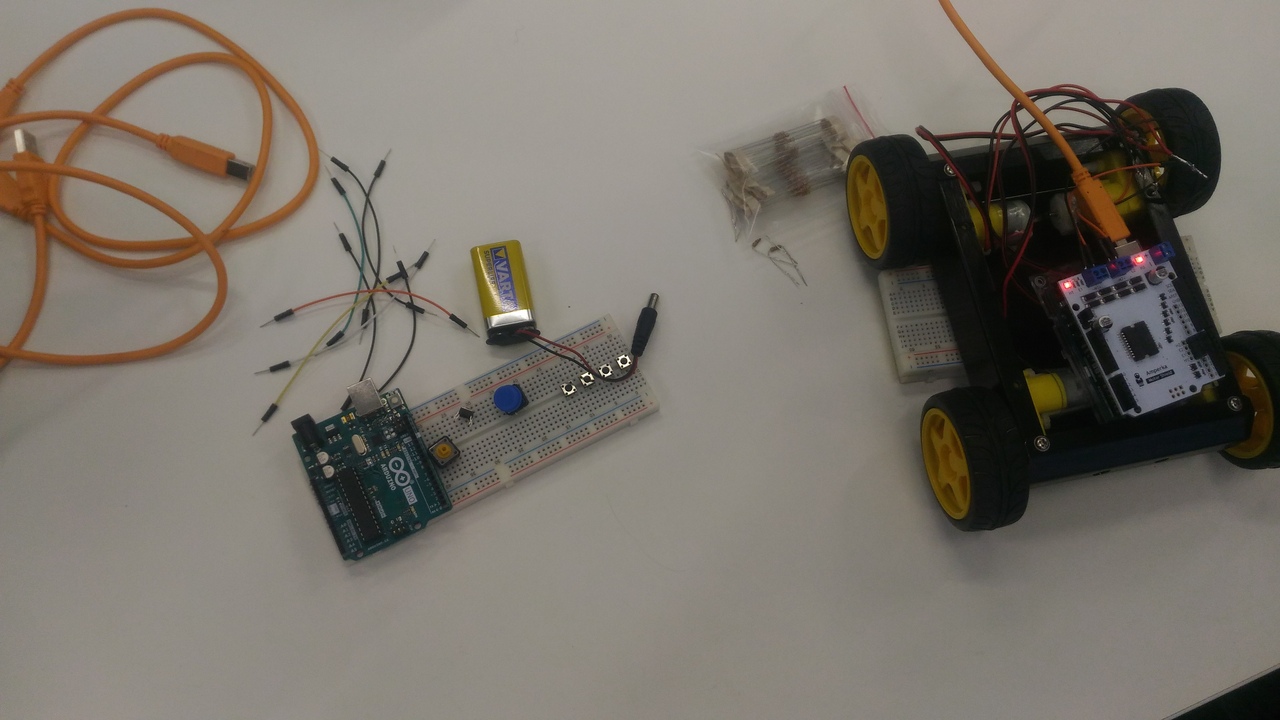
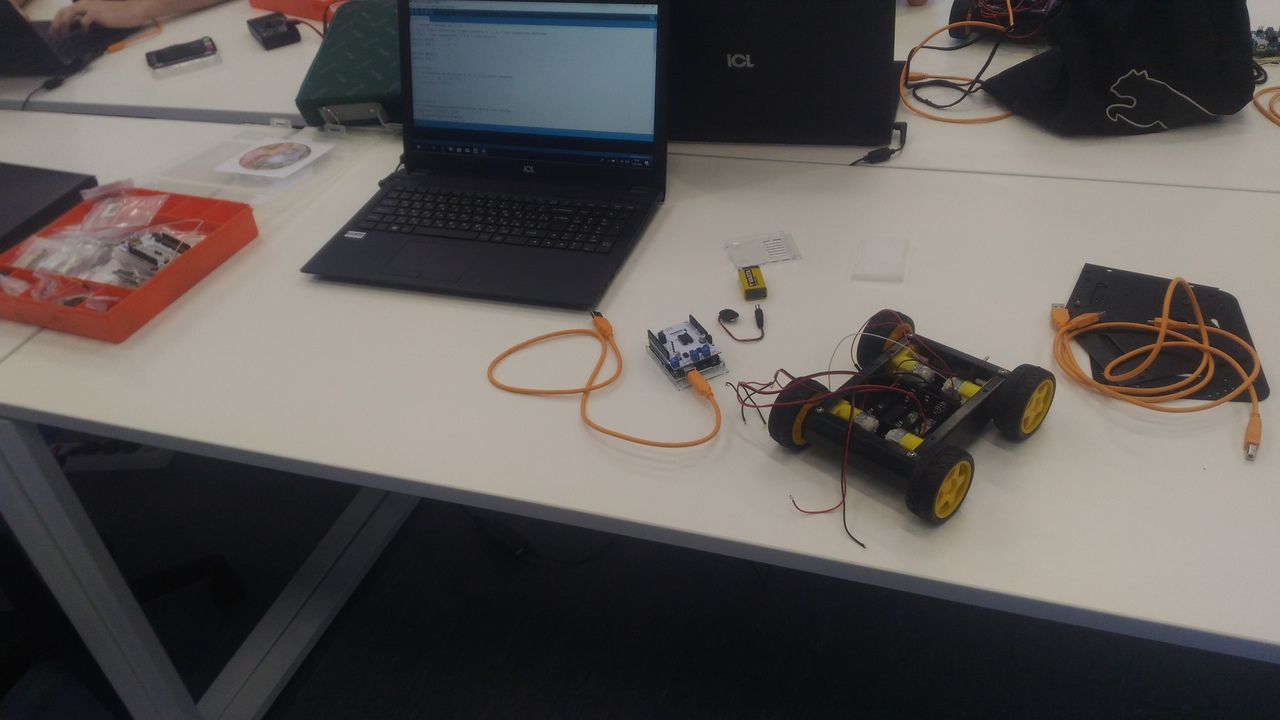
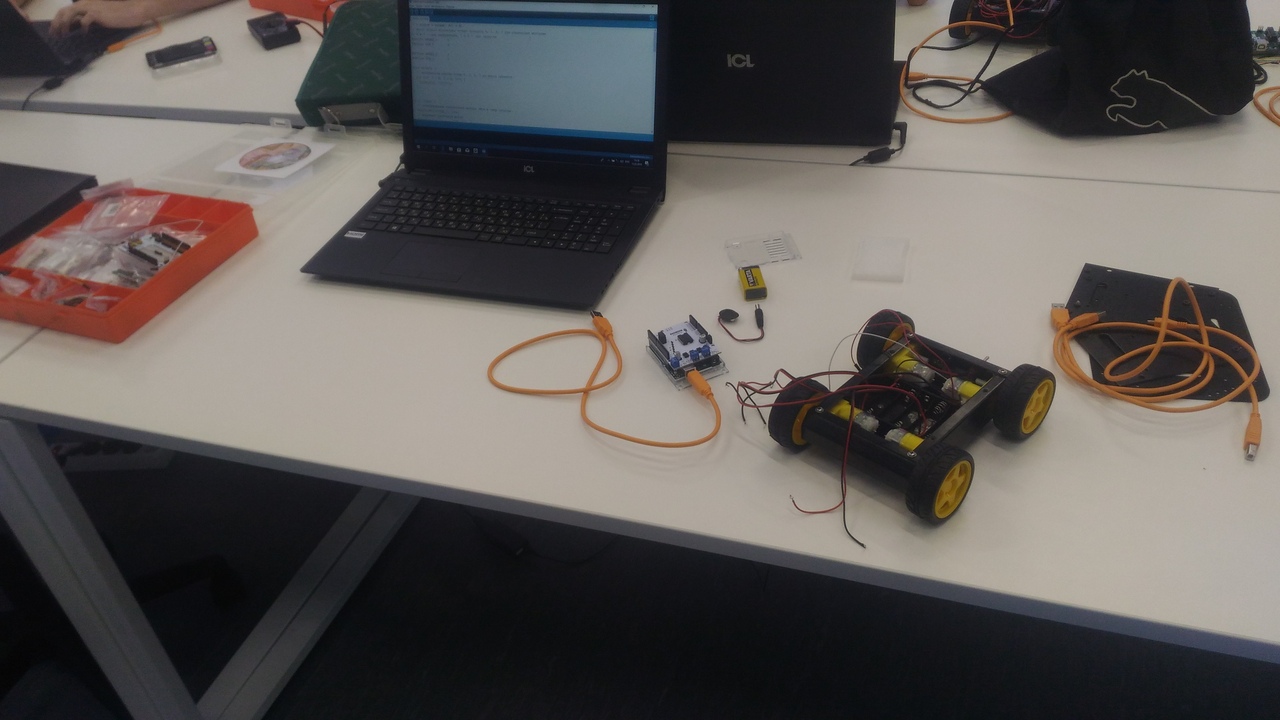
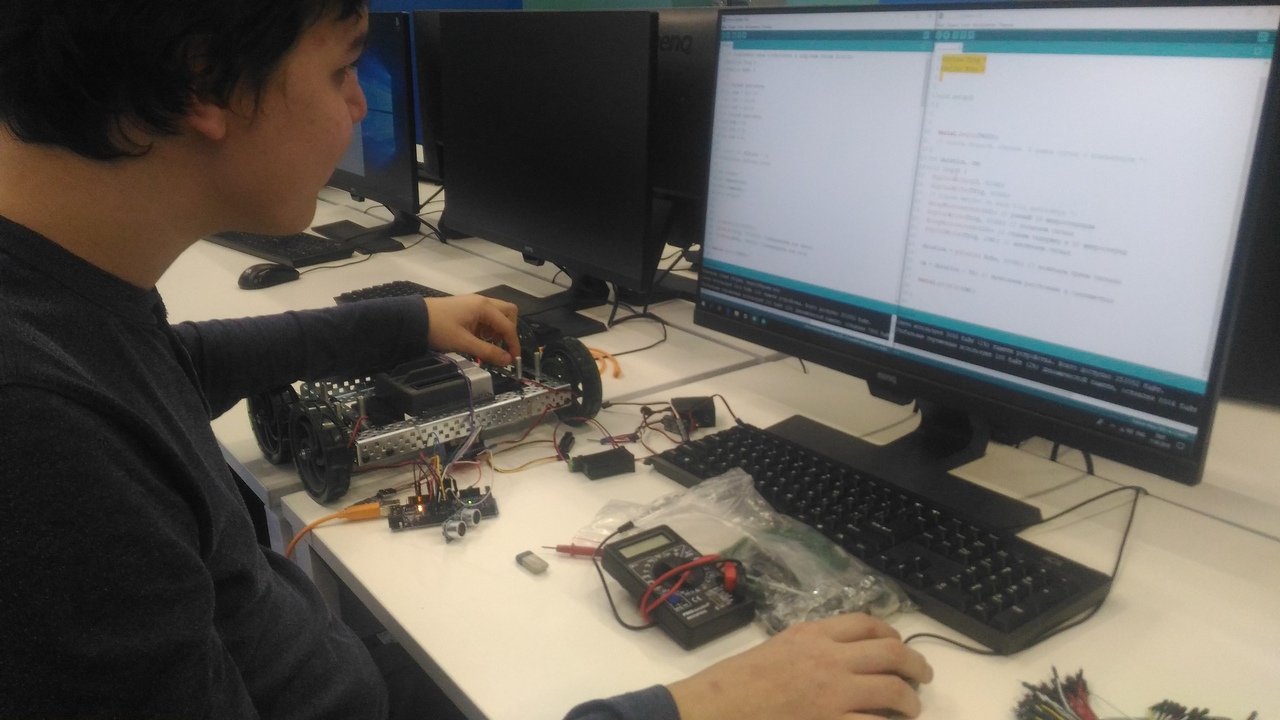
Подэтап 3. Программирование простых движений
Далее мы приступили к программированию. Нашей задачей было запрограммировать простые движения: вперед, назад, вправо, влево и остановка. Изначально нам показалось что задача была выполнена и колеса начали двигаться,но все оказалось далеко не так просто. Драйвер мотора, который было решено взять периодически давал сбой в ходе которого колеса крутились в разные стороны и не могли остановиться. После длительных попыток решить проблему было принято решение перейти на другой модуль: L298N. Хотя данного модуля небыло в наличии, он был быстро приобретен Кванториумом и дело наконец сдвинулось с мертвой точки. Робот выполнял весь перечень команд.
Этап 3
Создание системы ручного дистанционного управления
В этом разделе мы будем снабжать робота-снегоуборщика системой дистанционного управления.
Подэтап 1. Анализ существующих систем и выбор подходящей
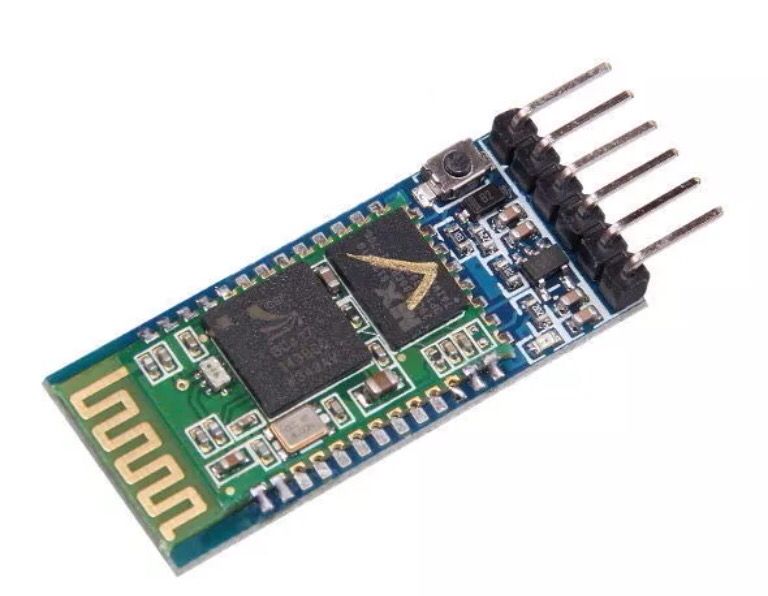
На этом подэтапе мы решили найти способ управлять роботом дистанционно и их оказалось множество: ИК, Bluetooth, Различные радиомодули низкой частоты, Wi-Fi и др. Сразу отметая такие варианты как ИК из за их ненадежности(данный вид связи работает в прямой видимости и очень чувствителен к внешним факторам), мы сосредоточились на радиосвязи и выбрали наиболее надежный и легкий, по нашему мнению, способ blurtooth. Использование модулей HC-06 сочетает в себе простоту использования(легко сделать из любого телефона пульт управления)и надежность(алгоритмы передачи данных блютуз самые сложные и защищенные из вышеперечисленных)
Подэтап 2. Сборка и поиск приложения для управления
После подключения модуля к плате Arduino сборка по сути заканчивается и мы переходим к поиску приложения bluetooth контроллера на андроид чтобы использовать его как пульт. Было перебрано множество приложений, тем которое бы обеспечивало наши потребности по количеству кнопок, изменению скорости и режимов, стало приложение Bluetooth RC Controller Car, которое и было выбранно.
Подэтап 3. Программирование системы дистанционного управления
После выбора всего необходимого дело оставалось за малым. Смартфон был соединен с модулем и платой ардуино через выбранное приложение. Посылая команды с пульта на смартфоне мы выяснили какие сигналы отправляются при нажатии каждой из кнопок и включили эти команды в программу, просто подставив в них функции движения,созданные во втором этапе. Немного подгонок и тестирований и все идеально заработало.
Этап 4
Снабжение робота системой обнаружения препятствий
На данном этапе мы будем постепенно переходить к автоматизации уборщика снега и запустим его по определенной траектории, добавив дальномер для того чтобы избежать столкновения с внезапно возникающими препятствиями.
Подэтап 1. Программирование езды по определенной траектории
В данной задаче не оказалось ничего сложного, скомбинировав функции мы быстро добились желаемого результата- езды "змейкой". Но робот каждый раз немного изменял траекторию при езде, из за отсутствия обратного контроля движений и положения в пространстве, но эта проблема будет решена дальше.
Подэтап 2. Переключение ручного и автоматического режимов
Поскольку режим автоматического управления является уже вторым его надо было включить в общую систему.Для этого мы запрограммировали смену ручного и автоматического режима на кнопку пульта, что после многократных тестирований, успешно получилось.
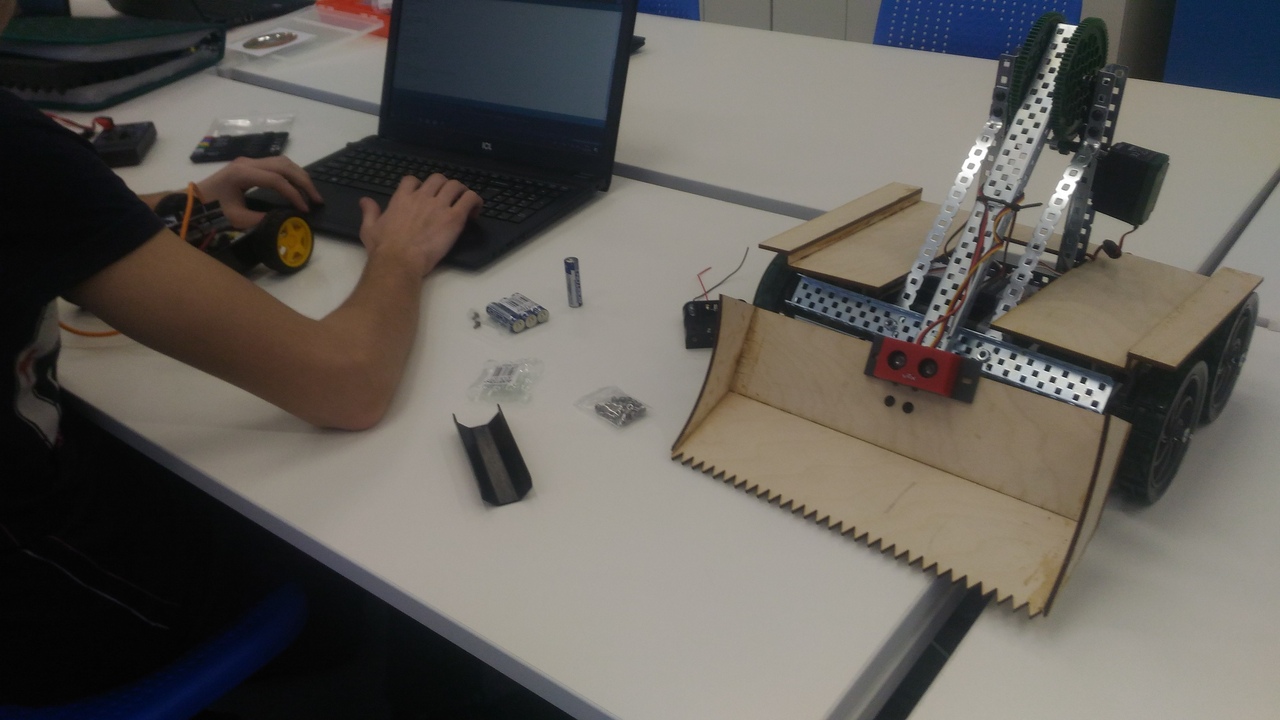
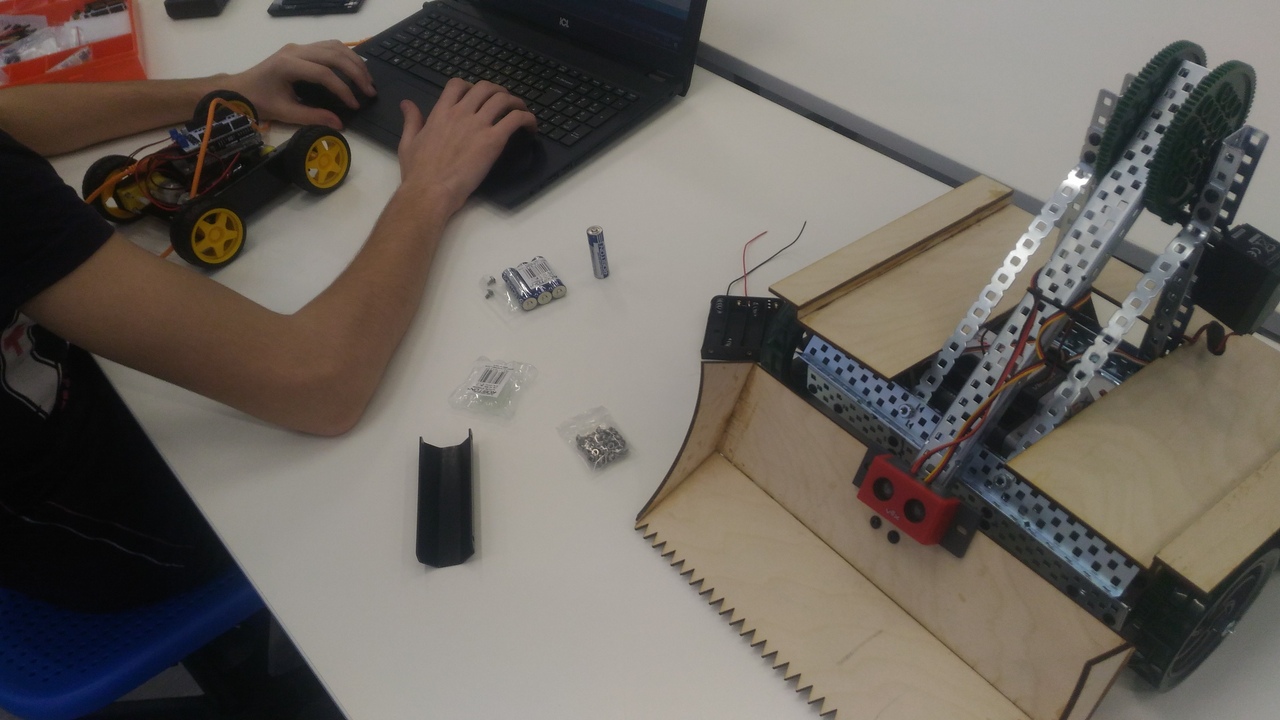
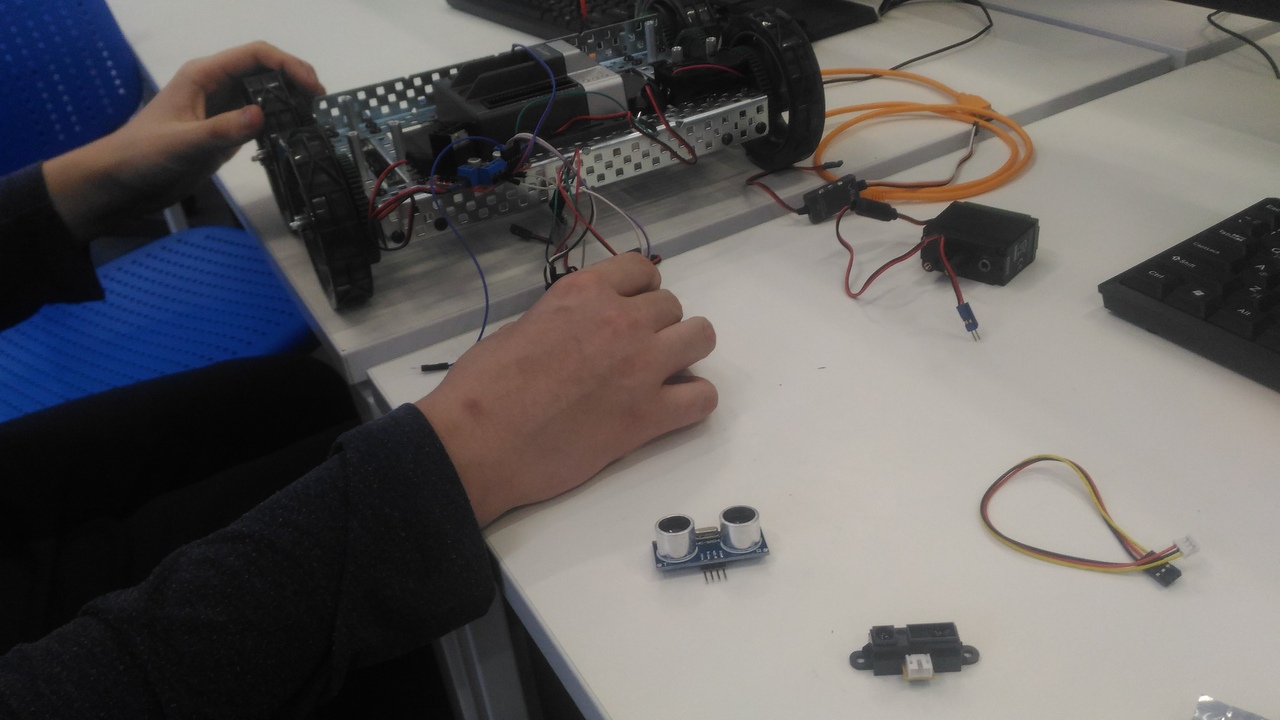
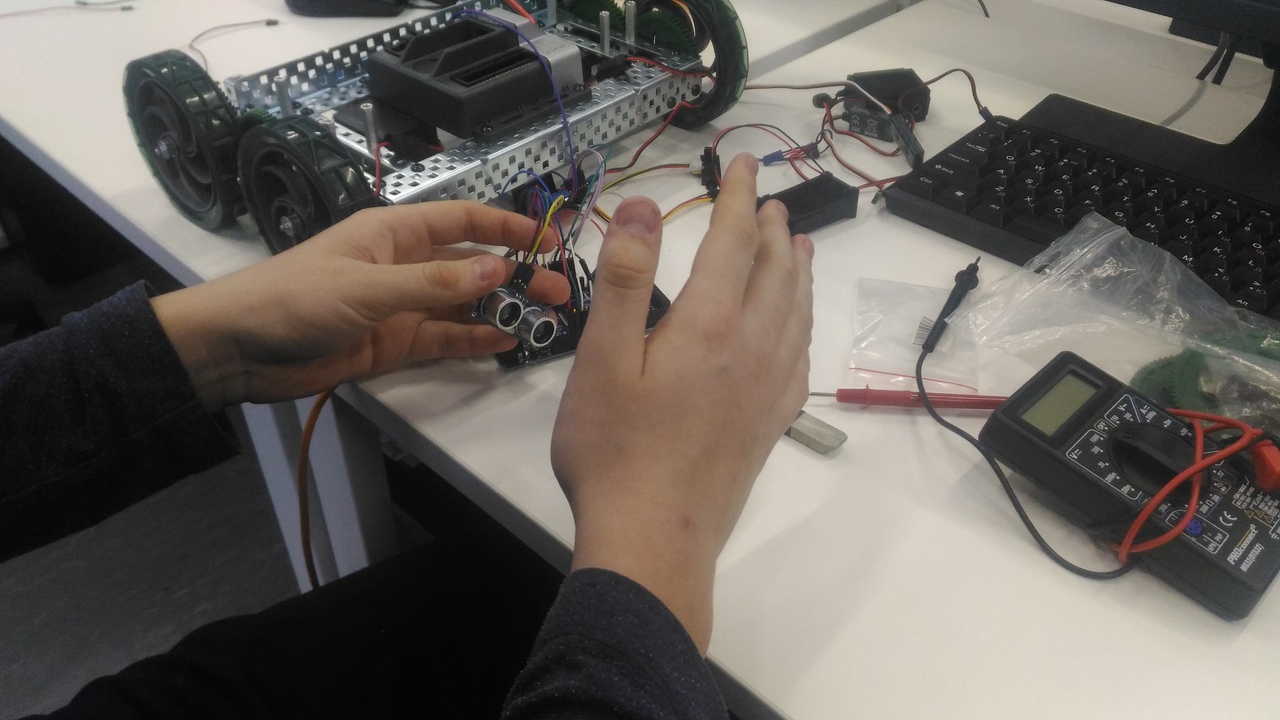
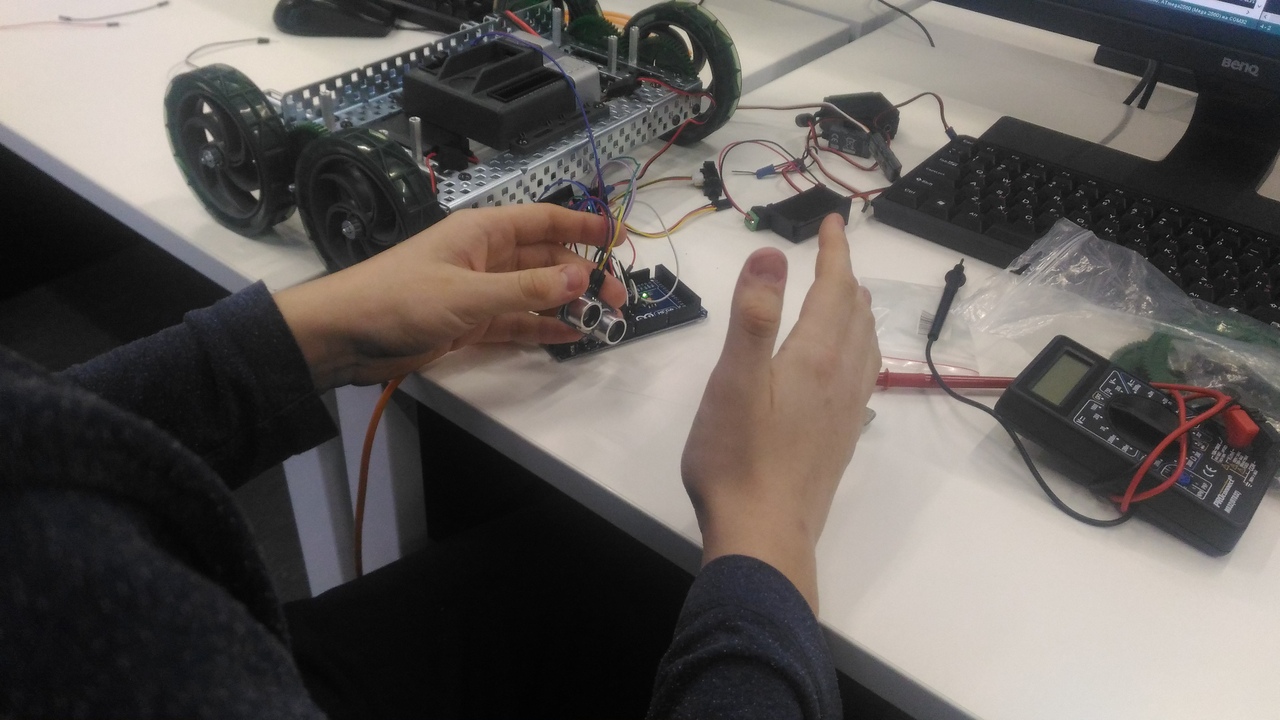
Подэтап 3. Система обнаружения препятствий
Следующим этапом стала система обнаружения препятствий которые могут внезапно возникнуть на пути.В данном случае речь идет не о стенах или бордюрах, а о проходящих людях, пробегающих животных и т. д.
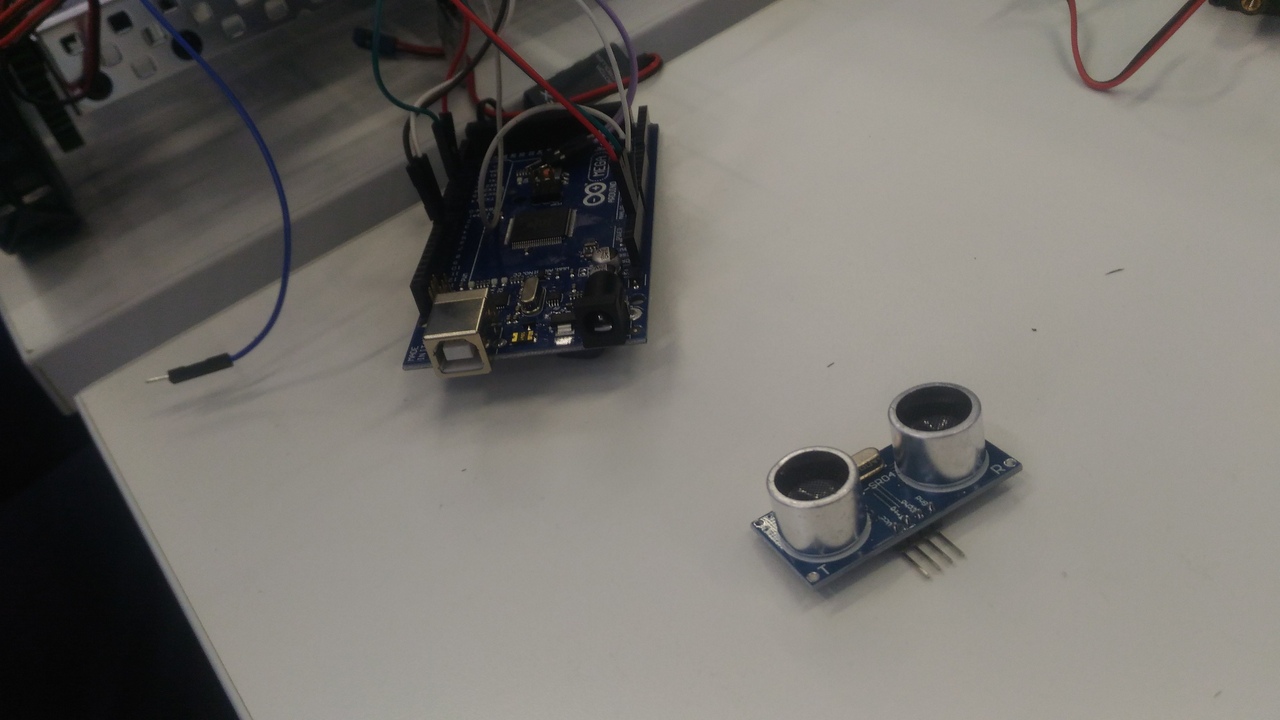
Был выбран довольно простой алгоритм, при появлении препятствия на расстоянии в метр уборщик снега останавливается и ждет до тех пор пока препятствие не исчезнет плюс выжидает еще полминуты чтобы точно удостовериться,что препятствие покинуло рабочую зону.
Выбор дальномера быстро остановился на ультразвуковом дальномере HC-SR04, так как он обладает неплохими соотношением характеристик, помехоустойчивости и цены.
Задуманное быстро удалось осуществить, но робот все еще недостаточно контролирует свои движения в автоматическом режиме, что и предстоит решить в следующем этапе.
Этап 5
Создание автоматической системы управления
На данном этапе мы создаем автоматическую систему управления ориентации в пространстве.
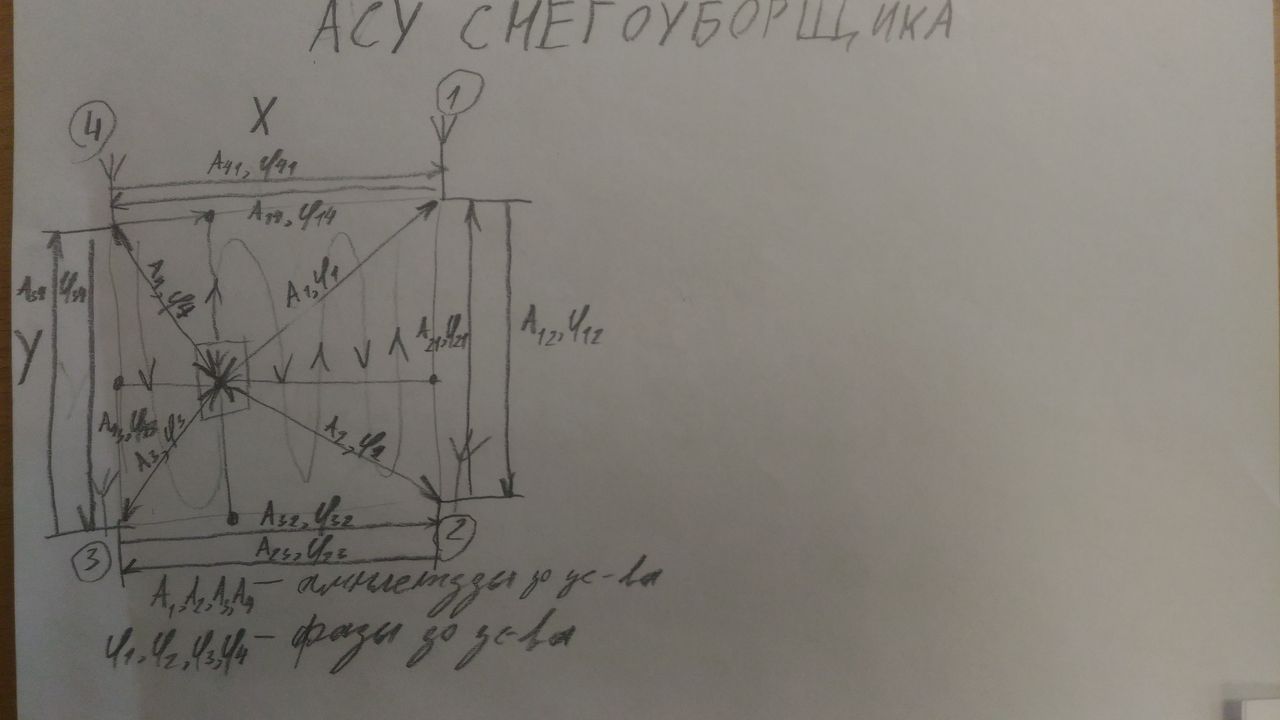
Подэтап 1. Ориентация в пространстве
После перебора нескольких идей, в виду наличия снега было решено остановиться на радиомаяках,которые бы определяли местоположение робота отсылая сигналы из нескольких точек, на антену робота. Вся система будет работать следующим образом: Робот-уборщик снега следует по заданной траектории, в это время 4 антены неприрывно посылают свой сигнал роботу, используя амплетуды и фазы этих сигналов можно вычислить расстояние на котором находится каждый маяк. Используя эти расстояния робот должен корректировать свою траекторию и не сбиваться с пути.
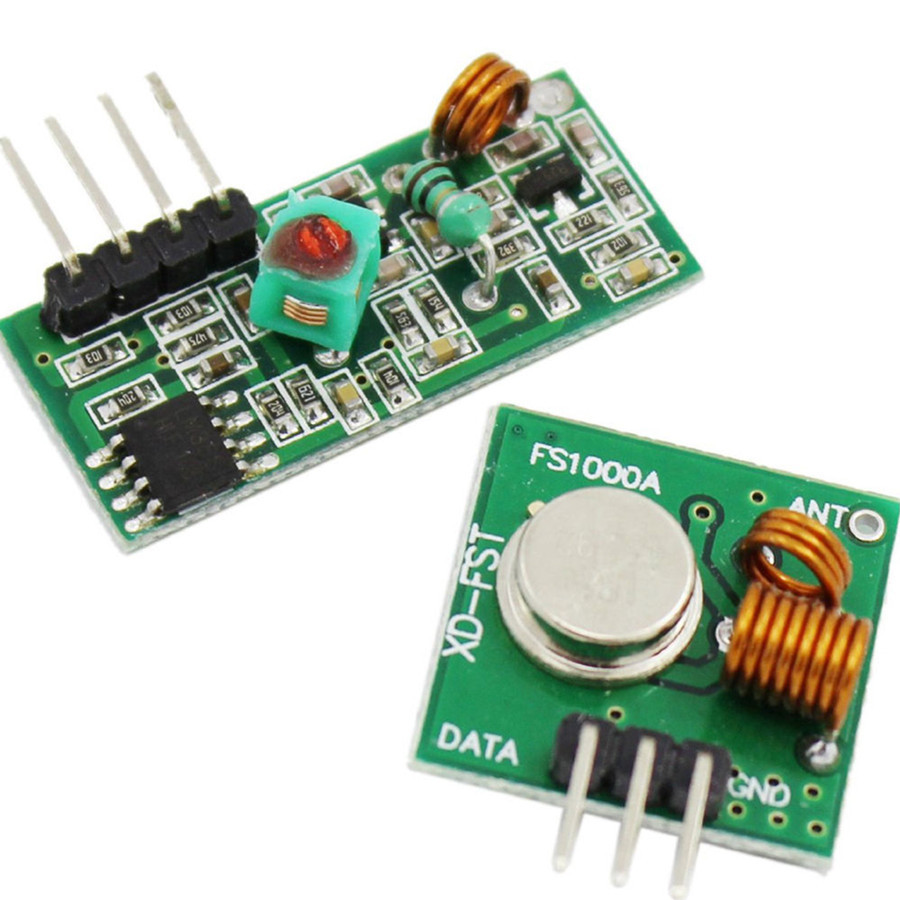
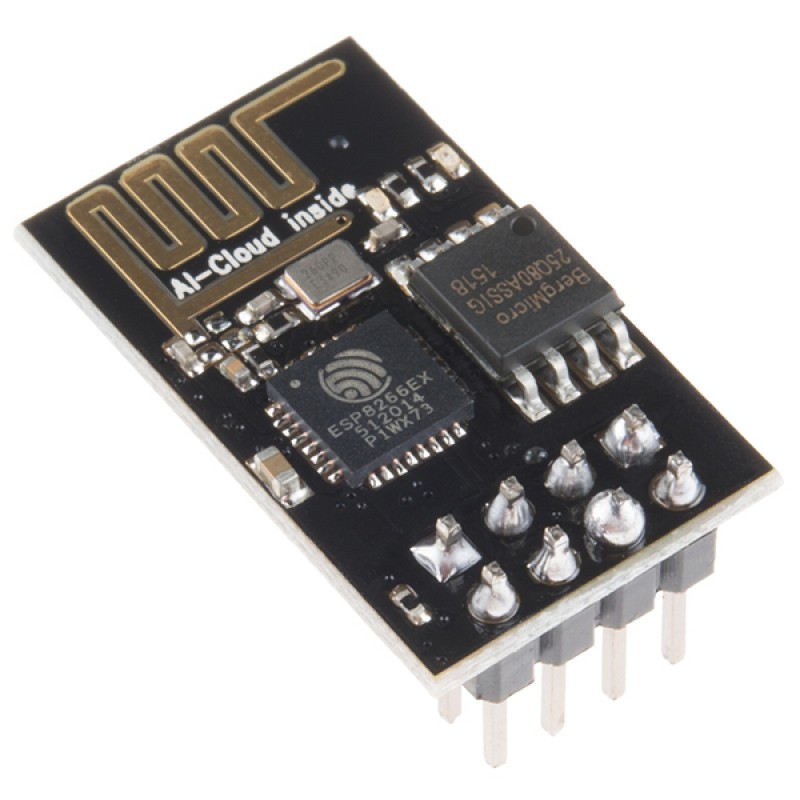
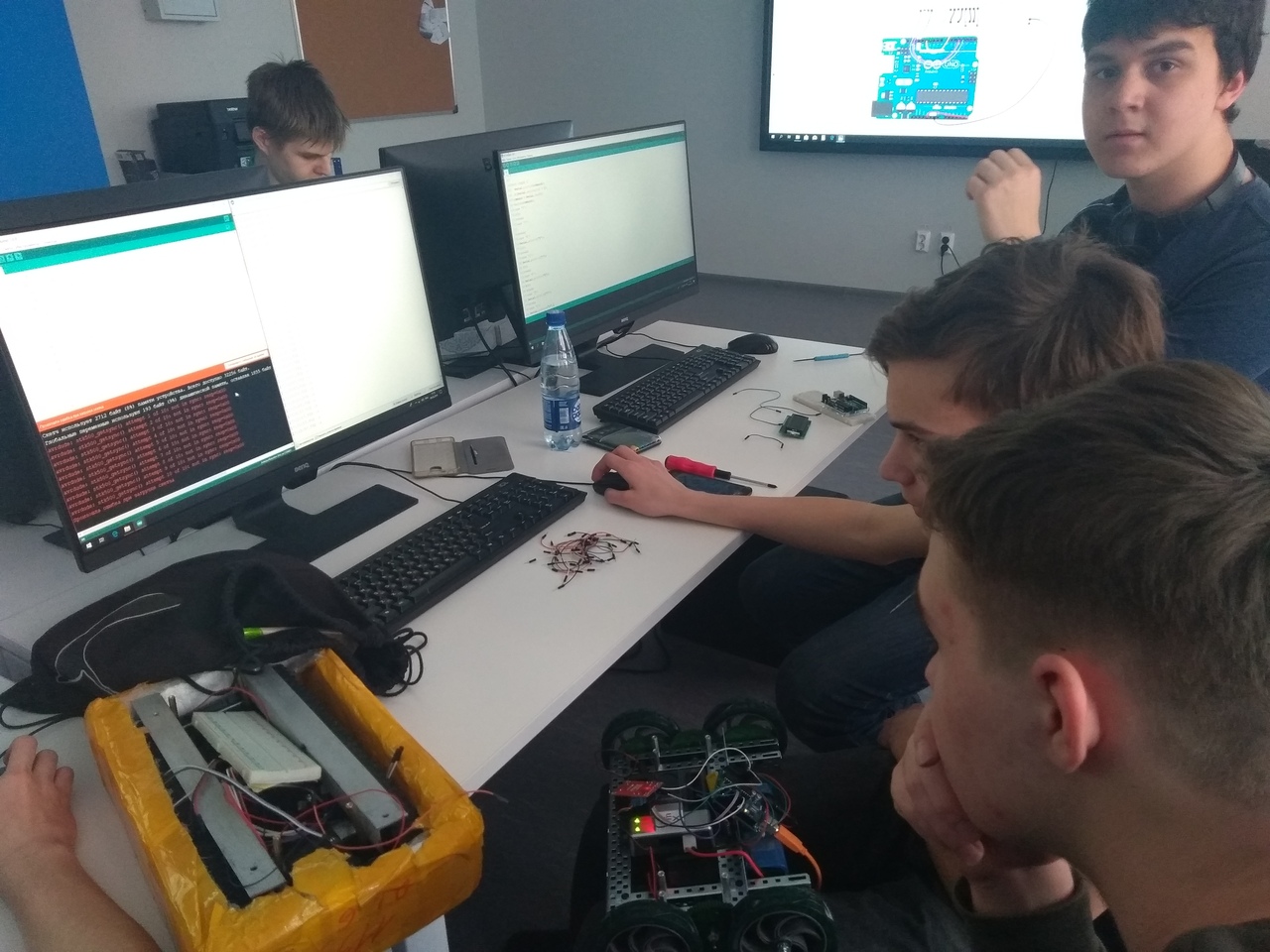
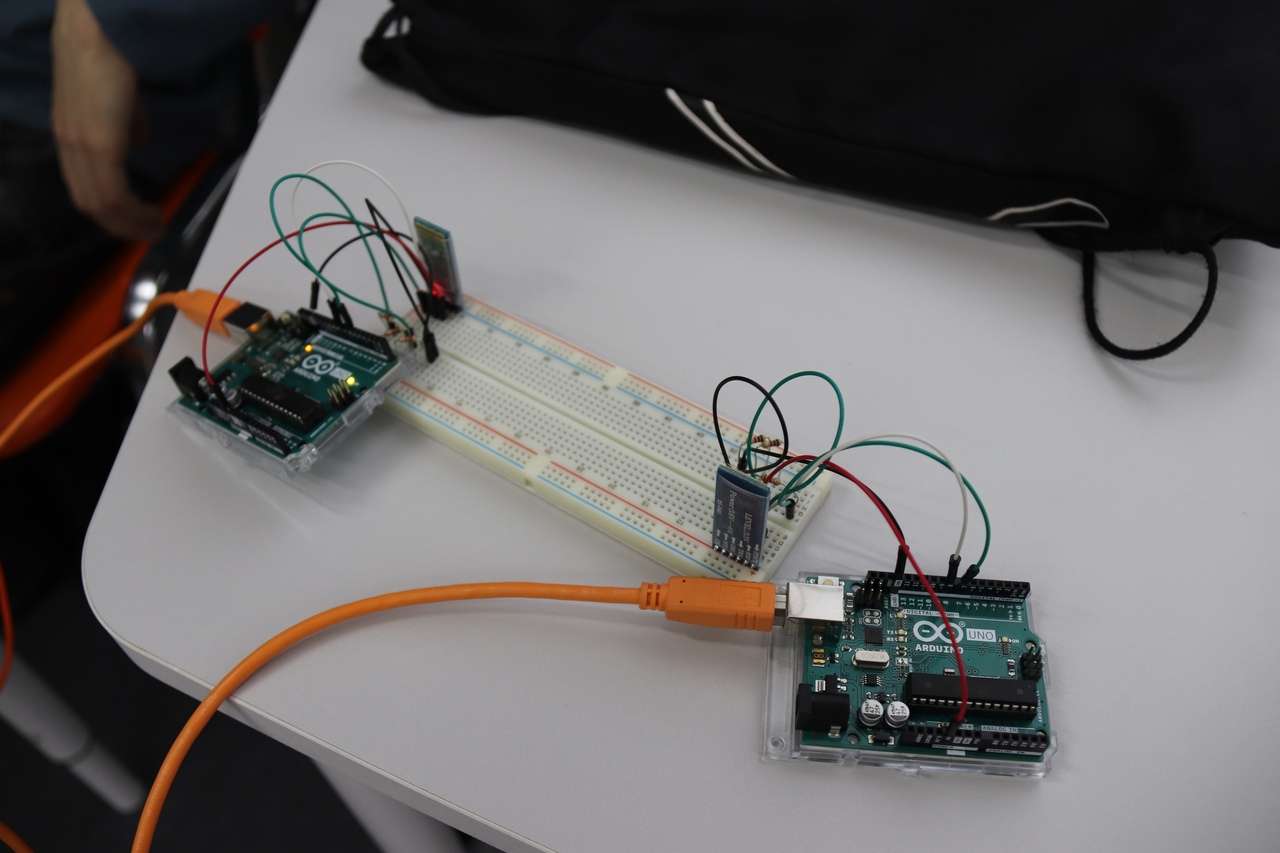
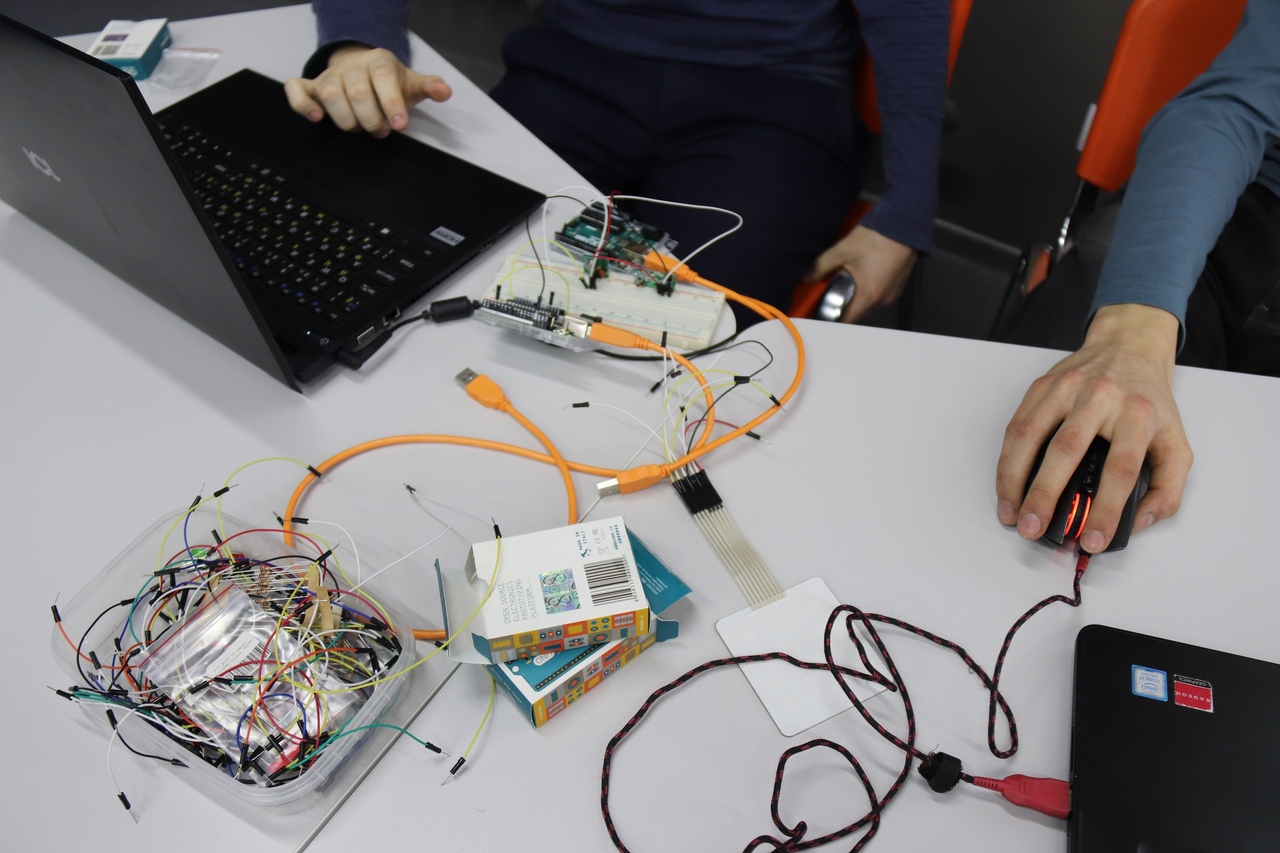
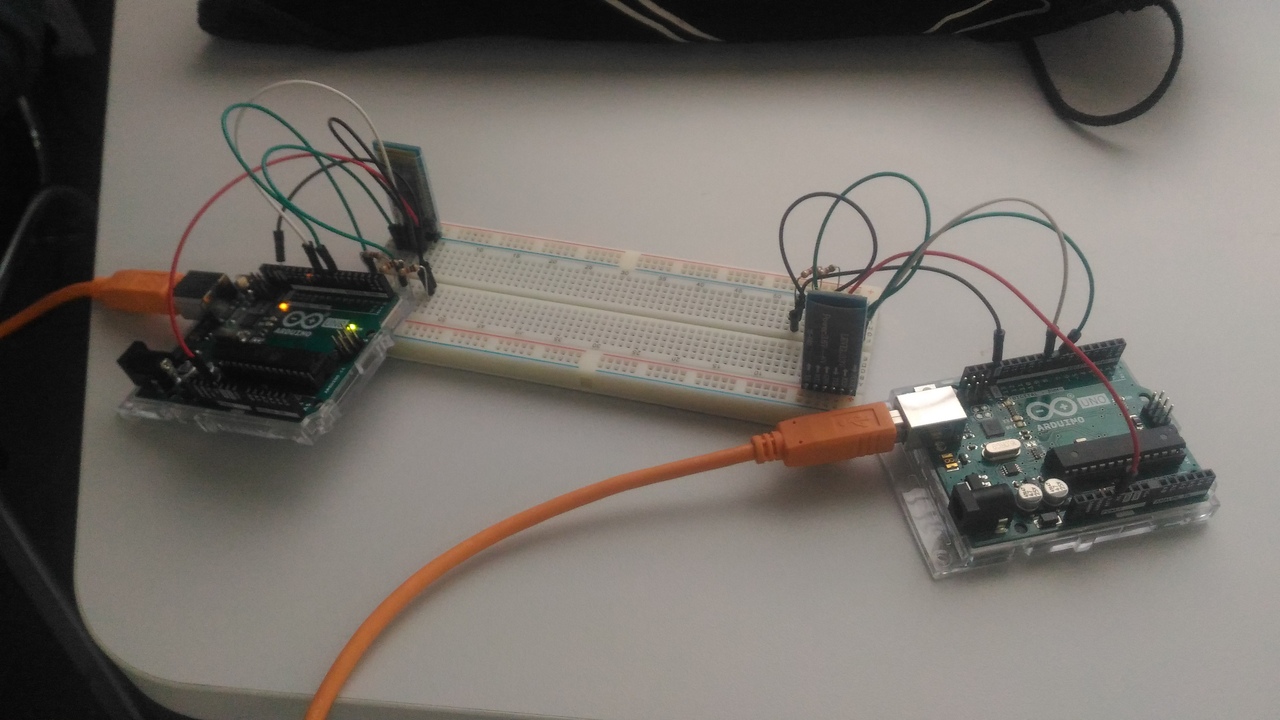
Подэтап 2. Выбор радиомодулей
Переходя от теории к практике было протестировано несколько модулей которые были разделены между нами: 433МГц, HC-05, ESP-01. HC-05 был отметен сразу слишком сложный обмен данными. От всех остальных модулей увы не удалось добиться удовлетворительного результата, хотя в теории их применение должно быть возможно.
Подэтап 3. Выбор модулей (продолжение)
Был опробован еще один модуль на этот раз RFM69HW 868 МГц, который попал в руки преподавателя, результата по связи добиться удалось.Идем дальше.

Этап 6
Завершение
Проектные отчеты, анализ проделанной работы.














































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}